DSBOARD-XV2 CANBus Interface Tutorial
WHAT YOU WILL LEARN?
1- The pinout of I/O connector
2- Examples of can-utils tools
ENVIRONMENT
Hardware: DSBOARD-XV2
OS: Jetpack 4.6
In this blog post, we will test the CANBus interface of DSBOARD-XV2.
The Pinout of I/O Connector
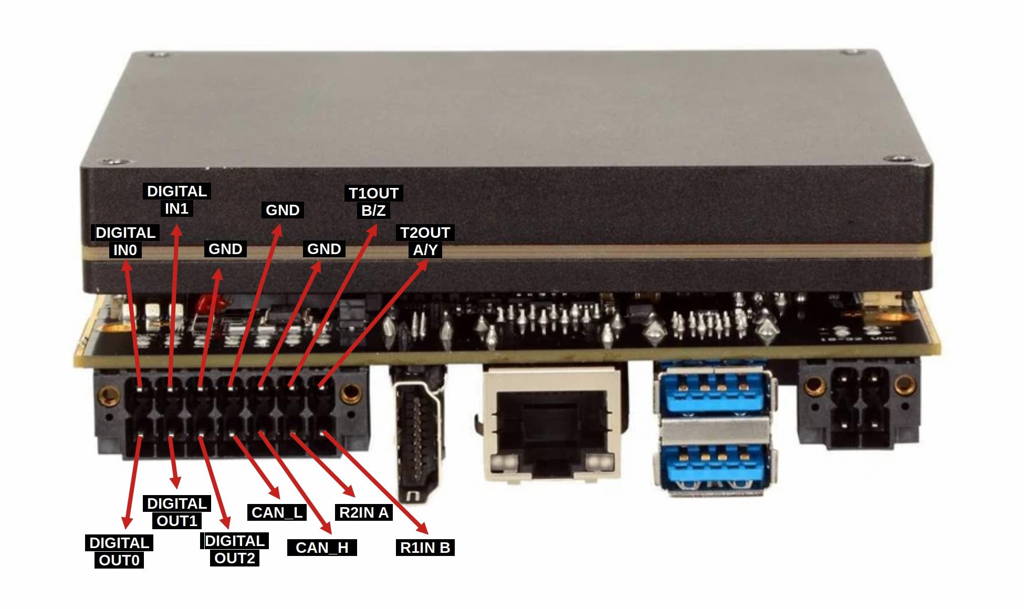
First, let's look at the I/O connector. On the connector, there are 2 pins for CAN Bus and 1 pin for isolated ground. When using CAN Bus always double check which ground pin you are using. You must use digital ground for CAN Bus applications.
Examples of can-utils Tools
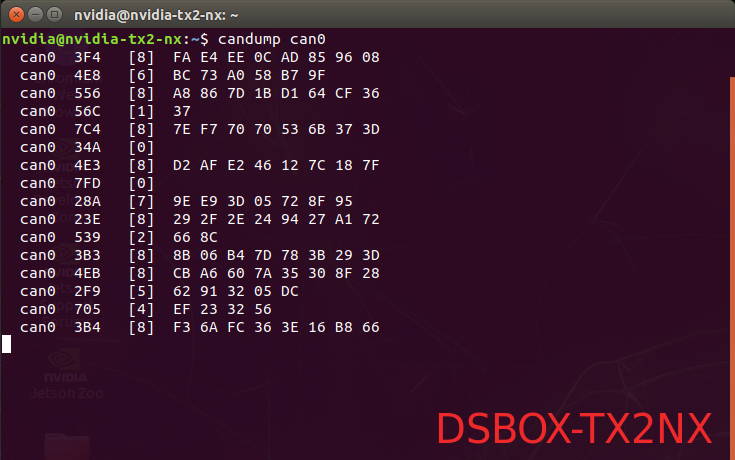
To test CAN Bus functionality, we used a DSBOX-TX2NX as a test equipment (It has 120Ω termination resistor included). (If you use a USB-CAN adapter, connect that adapter to the USB port of the host PC and install its driver software if necessary.) To the other side of the connector, connect your device’s CAN pins.
On host side, be sure that you are using same bitrate with your device.
On next step, activate CAN drivers and activate CAN interface on DSBOARD-XV2 with “ip link” command below:
sudo busybox devmem 0x0c303000 32 0x0000C400
sudo busybox devmem 0x0c303008 32 0x0000C458
sudo busybox devmem 0x0c303010 32 0x0000C400
sudo busybox devmem 0x0c303018 32 0x0000C458
sudo modprobe can
sudo modprobe can_raw
sudo modprobe mttcan
sudo ip link set can0 type can bitrate 500000 dbitrate 2000000 berr-reporting on fd on
sudo ip link set up can0
Now, you can use can-utils tools to communicate.
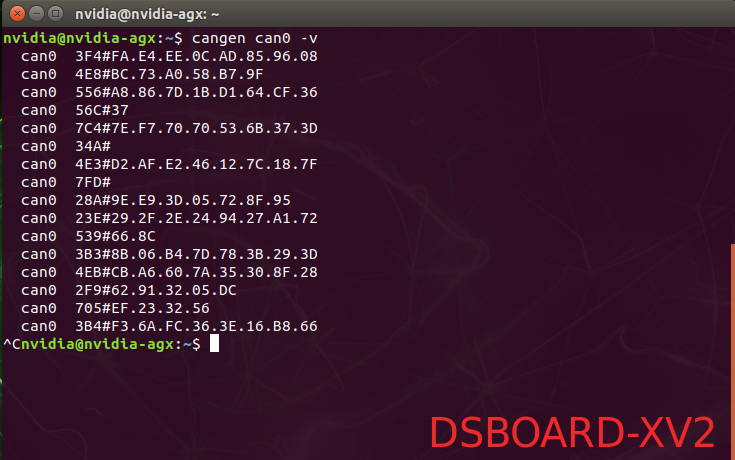
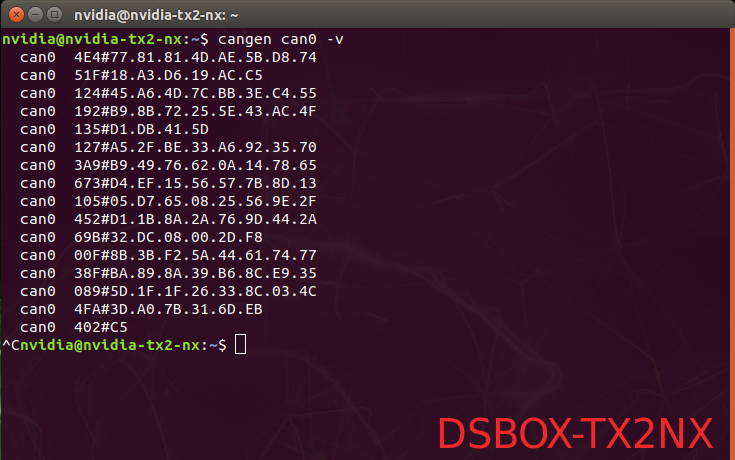
Use cangen to write random data:
cangen can0 -v
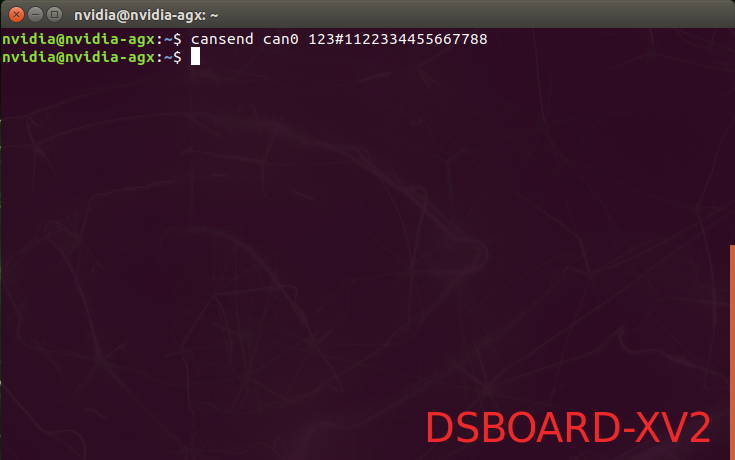
Use cansend to write data:
cansend can0 123#1122334455667788

Use candump to listen bus:
candump can0

Thank you for reading our blog post.