JetPack Installation on MILBOARD-XV for NVIDIA® Jetson™ AGX Xavier™
WHAT YOU WILL LEARN?
1-Installing JetPack on Jetson AGX Xavier
2- Updating the device tree file
3- Installing Jetson SDK Components
ENVIRONMENT
Hardware: MILBOARD-XV
OS: Ubuntu 18.04 LTS
Language: Bash
DOWNLOADS
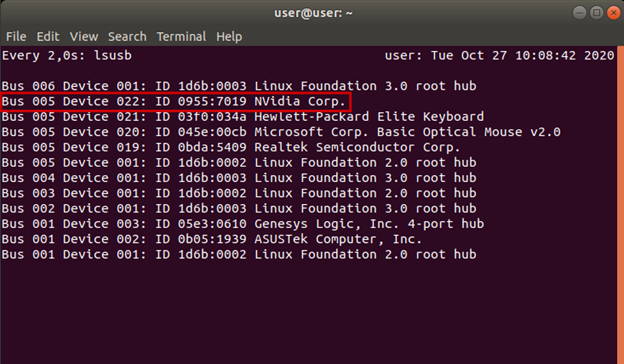
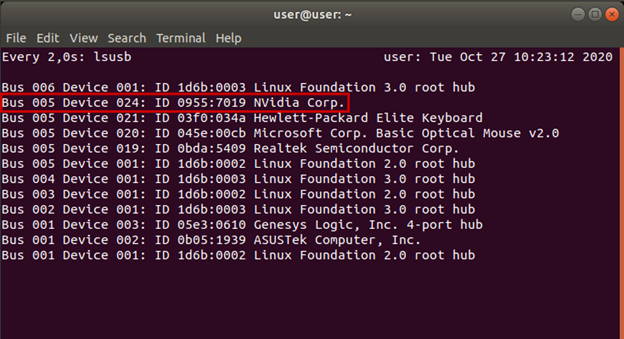
First, connect the recovery (between installer PC & MILBOARD-XV's recovery usb), ethernet & power connection of your MILBOARD-XV. Open a terminal to your installer pc and type "watch lsusb".
When MILBOARD-XV's, military grade rugged fanless computer, power connector plugged in,
• push reset & recovery buttons together
• release reset button & recovery button after 3 seconds later.
You should see "NVidia Corp." title in the terminal.
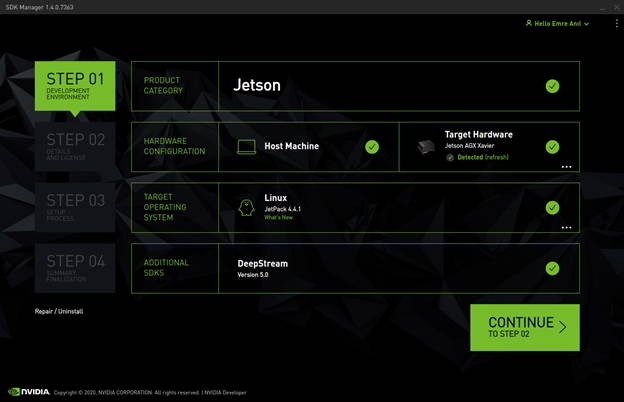
Next, set your configurations in the Nvidia SDK Manager.
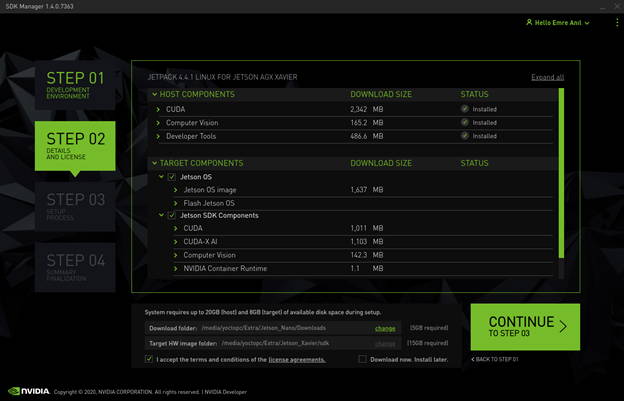
Accept the license agreement and continue to step 3.
Nvidia SDK Manager asks your password to installation. Fill it and continue.
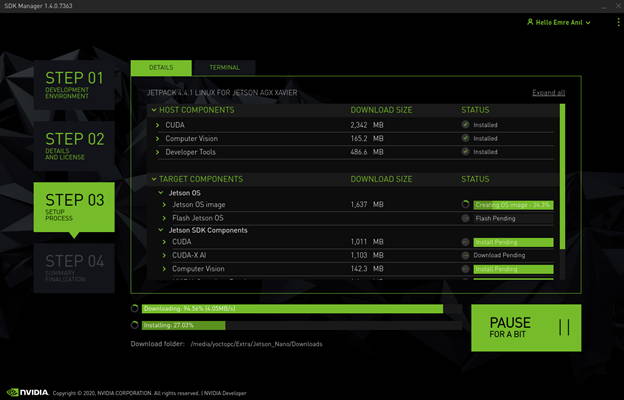
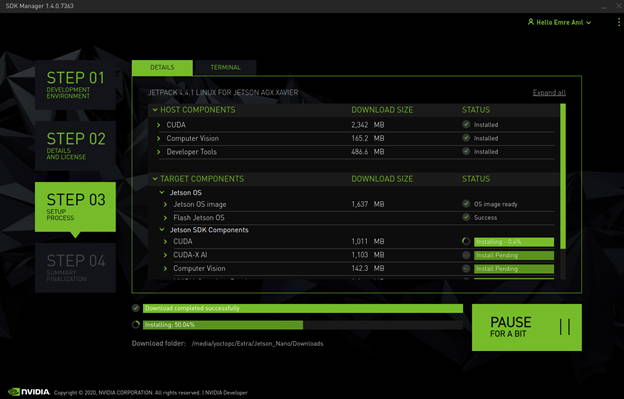
After all packages have been downloaded, Jetson OS will be installed on the MILBOARD-XV.
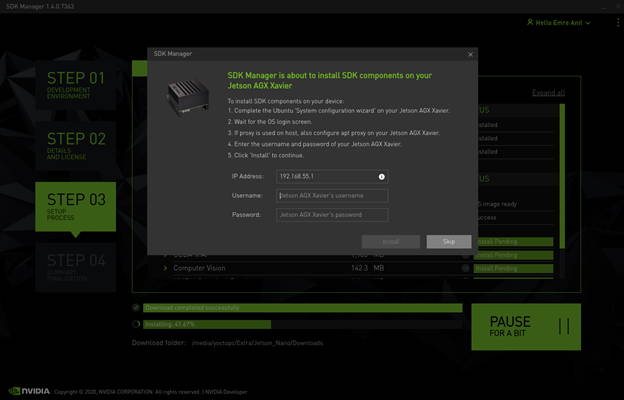
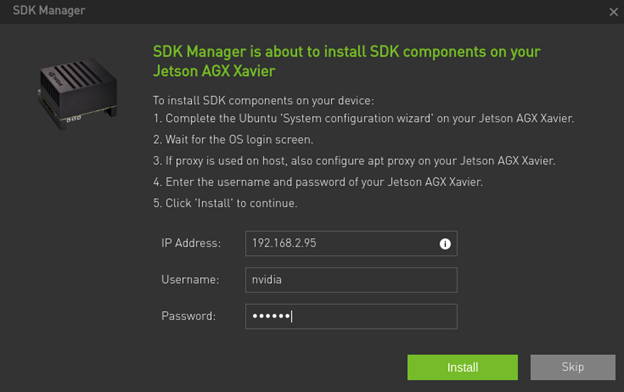
After the first part of the installation is complete, the SDK Manager asks your Xavier's IP address, username & password. We will continue from here after the second part.
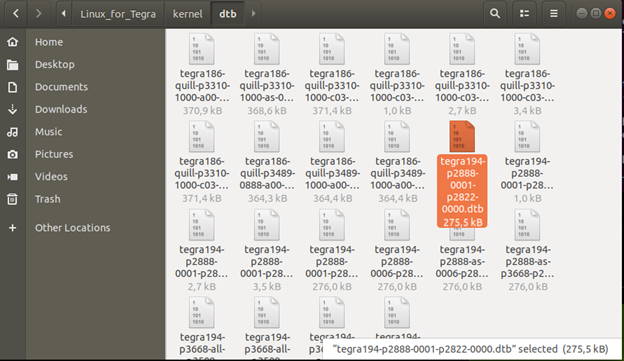
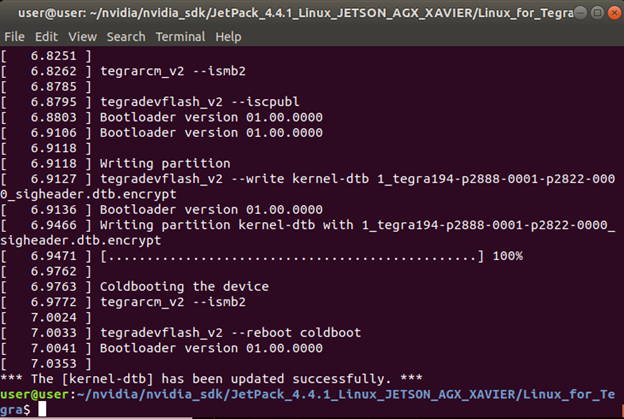
In the second part, copy your dtb file to kernel/dtb folder at the end of the post. The full path of the folder is (for JetPack 4.4.1):
~/nvidia/nvidia_sdk/JetPack_4.4.1_Linux_JETSON_AGX_XAVIER/Linux_for_Tegra/kernel/dtb
Put your NVIDIA Jetson Xavier in recovery mode and check it from the terminal.
.
Put your NVIDIA Jetson Xavier in recovery mode and check it from the terminal.
cd ~/nvidia/nvidia_sdk/JetPack_4.4.1_Linux_JETSON_AGX_XAVIER/Linux_for_Tegra/
sudo ./flash.sh -r -k kernel-dtb jetson-xavier mmcblk0p1/
/
Once the dtb file is successfully updated, configure your Xavier's Ubuntu installation progress (language, keyboard type, location, username & password etc.).
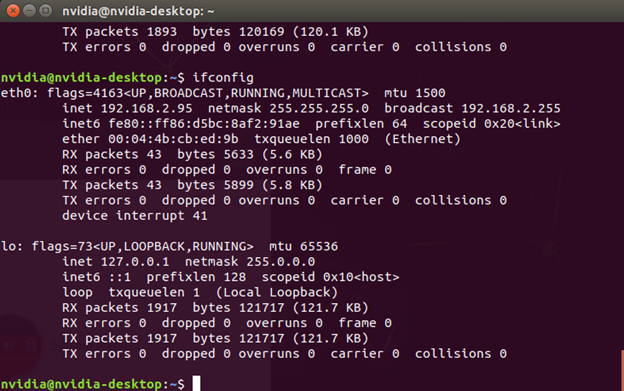
After the previous step, you have to update kernel image file. Then copy "Image" file that attached end of the post to the MILBOARD-XV's /boot path. To do this attach ethernet cable and find your ip address on MILBOARD-XV's Desktop using ifconfig command.
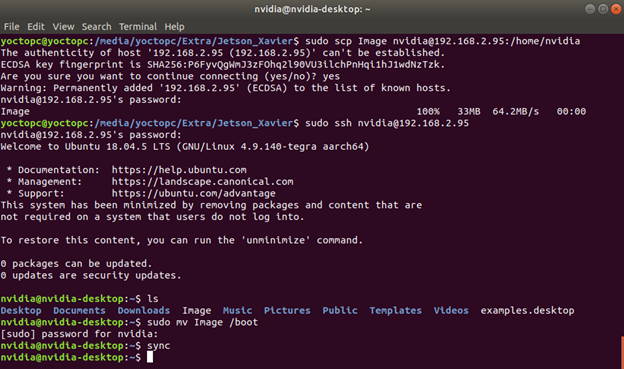
Copy "Image" file over ssh to /home/nvidia path then move that file to /boot folder. After this step reboot your NVIDIA Jetson Xavier.
To avoid kernel update with "apt upgrade" or "apt-get upgrade" commands, please follow this guide on the Jetson module.
Finally, complete the SDK Manager installation progress. Type username & password and click "Install".
Thank you for reading our blog post.